1. VMware 설치하기
-VMware Customer Connect > Downloads > VMware Workstation Player 17.5.0 > Goto downloads > 운영체제에 맞는 VMware 설치 [Windows 64-bit]




2. Ubuntu 20.04 설치하기
-google 검색 > Ubuntu 20.04 downlad > 64-BIT pc(amd64) desktop image 다운로드


3. VMware로 Ubuntu 20.04 실행하기
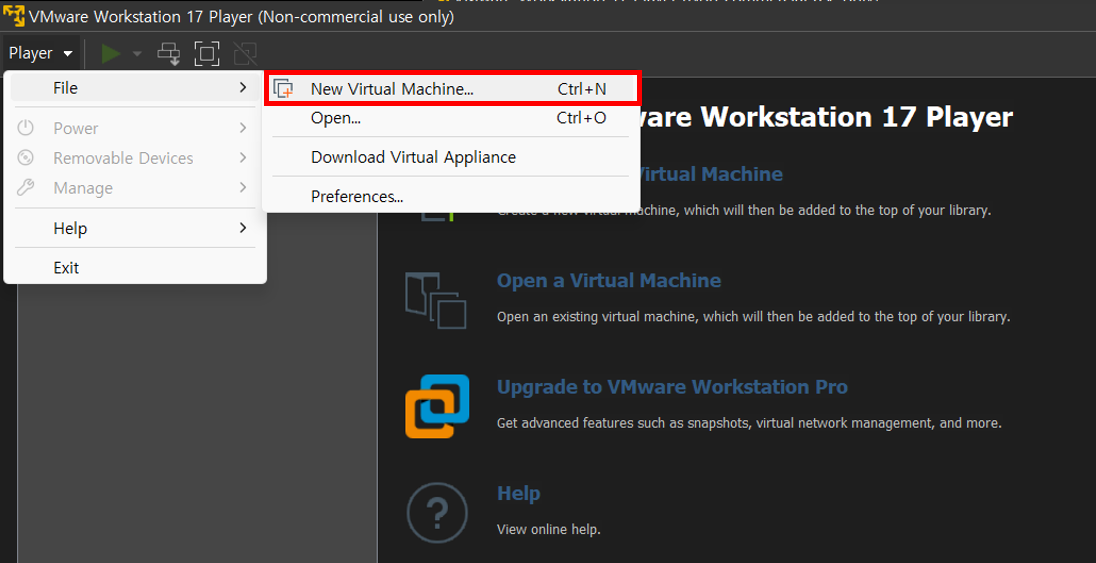
-Ubuntu 20.04 설정 > Full name/ User name/ Password 설정 > 기본값 설정





-Install 진행 중...

-Ubuntu 설치 및 실행 완료!

4. VMware 최적화
1) VM 메뉴 > settings 들어가기

2) Hardware 탭 선택 > Display 선택 > Accelerate 3D graphics 체크 해제

3) Options 탭 선택 > Unity 선택 > 모든 항목 체크 해제

=> VMware 16 이하는 더 많은 설정 변환을 통해 최적화가 가능하지만, VMware 17 부터는 Snapshots, Advanced 등의 옵션들이 사라져서 일단 이 정도 방법으로 성능/속도를 높일 수 있다.
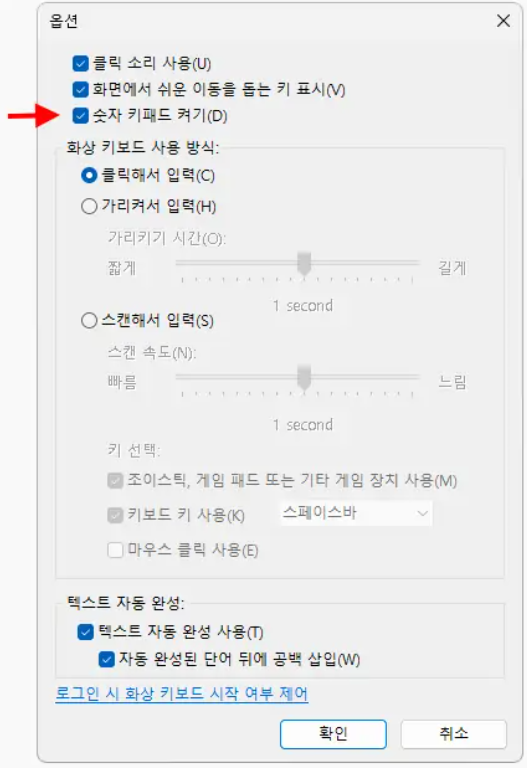
[추가] Caps Lock ON/OFF 반복 문제 해결
추가로 나는 Caps Lock ON/OFF가 반복되는 문제도 발생했어서, 이를 해결해주기 위한 방법도 함께 소개하도록 하겠다.
1) 윈도우 + R > osk 입력 후 확인

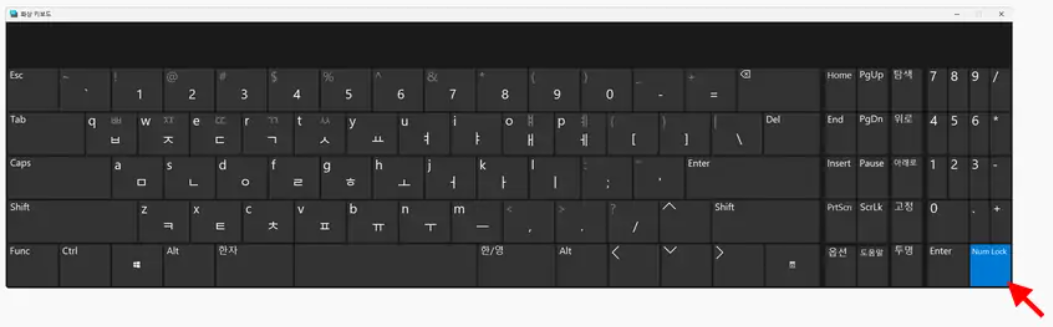
2) 가상 키보드 옵션 탭 선택 > 숫자 키보드 켜기 체크> 새로 생긴 Num Lock 키를 눌러 Caps Lock 비활성화 (파란색->검정색)
5. ROS noetic 설치하기
*만약 ROS noetic 설치하려고 한다면, 해당 글에 정리해둔 코드를 복붙하지 말고 아래의 ROS Wiki 링크로 들어가 제공되는 코드를 복붙하는 것을 권유한다. (최신 버전으로 계속해서 업데이트될 수 있기 때문에)
https://wiki.ros.org/noetic/Installation/Ubuntu
noetic/Installation/Ubuntu - ROS Wiki
If you rely on these packages, please support OSRF. These packages are built and hosted on infrastructure maintained and paid for by the Open Source Robotics Foundation, a 501(c)(3) non-profit organization. If OSRF were to receive one penny for each downlo
wiki.ros.org
1) 인터넷 창 > ROS noetic install 검색 > Ubuntu install of ROS Noetic 접속

2) 터미널 창에 Install 코드 작성하기 [다음의 순서로 진행]
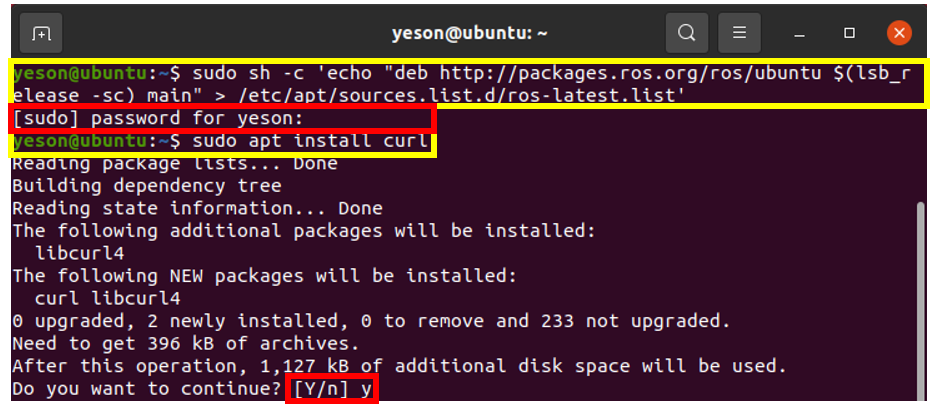
A. Setup your sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
=> password for ____: 에 password 입력 후 enter
B. Set up your keys
sudo apt install curl
=> Do you want to continue? 에 Y 입력 후 enter
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
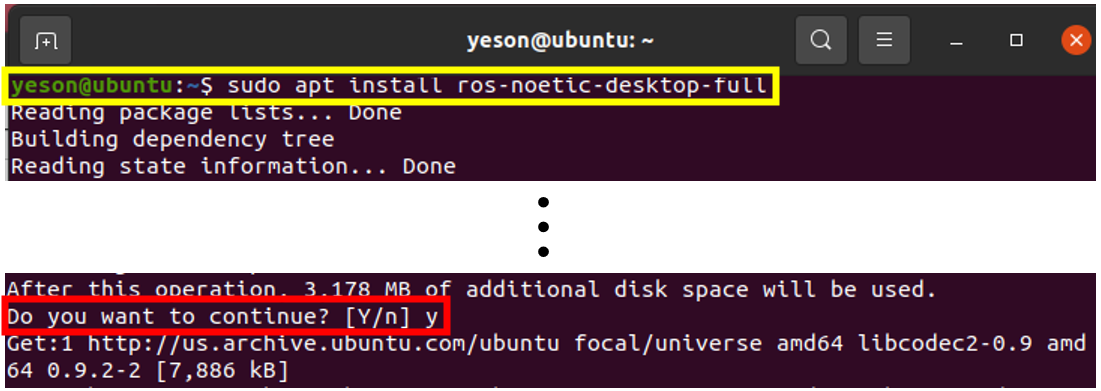
C. Installation
sudo apt update
*아래의 코드는 실행 후 시간이 꽤 걸림.
sudo apt install ros-noetic-desktop-full=> Do you want to continue? 에 Y 입력 후 enter
D. Environment setup
source /opt/ros/noetic/setup.bashecho "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc
E. Dependencies for building packages
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential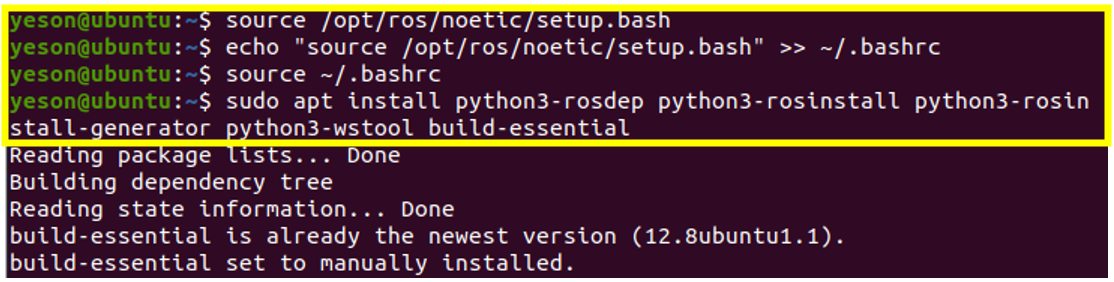
F. Initialize rosdep
sudo apt install python3-rosdepsudo rosdep initrosdep update
3) ROS가 정상적으로 설치되었는 지 확인하기
위의 과정을 모두 거쳐주었으면 이제 ROS가 정상적으로 깔렸는지 확인해줘야 한다.
새로운 터미널을 켜서 roscore을 입력했을 때, 아래의 사진처럼 뜬다면 ROS가 정상적으로 설치된 것이다.

VMware/Ubuntu 20.04에 ROS noetic 설치까지 완료!
'ROS(Robot Operating System)' 카테고리의 다른 글
| (4) 라즈베리파이에 Ubuntu 20.04 부팅하기 [+ROS noetic 설치] (0) | 2024.01.30 |
|---|---|
| (3) ssh 원격 접속 / wifi 세팅 / 오버클럭 설정 (*선택사항) (0) | 2024.01.30 |
| (2) SD 카드 굽기 (Raspberry Pi Imager / Balena Etcher) (0) | 2024.01.30 |
| (1) SD 카드 포맷하기 (+Fomatter 없이 포맷하는 법) (1) | 2024.01.28 |
| ROS 네트워크 설정 방법 [PC 다중 통신] (1) | 2024.01.28 |



